자동차/네트워크
🔌LIN 통신, 자동차 전자제어의 핵심을 알아 보자.
bingbingroom
2025. 6. 3. 13:00
반응형
🔌LIN 통신이란?
LIN(Local Interconnect Network) 통신은 자동차 내 저속 장치 간 통신을 위해 개발된 단선 기반의 직렬 통신 방식입니다. 주로 차량 내 편의 장치 제어에 사용되며, 경제성과 간편한 구조가 특징입니다. CAN 통신의 보조 통신망으로, 액추에이터, 센서, 스위치 등의 서브 시스템과 통신하는 데 적합합니다.
🔍 전체 구조
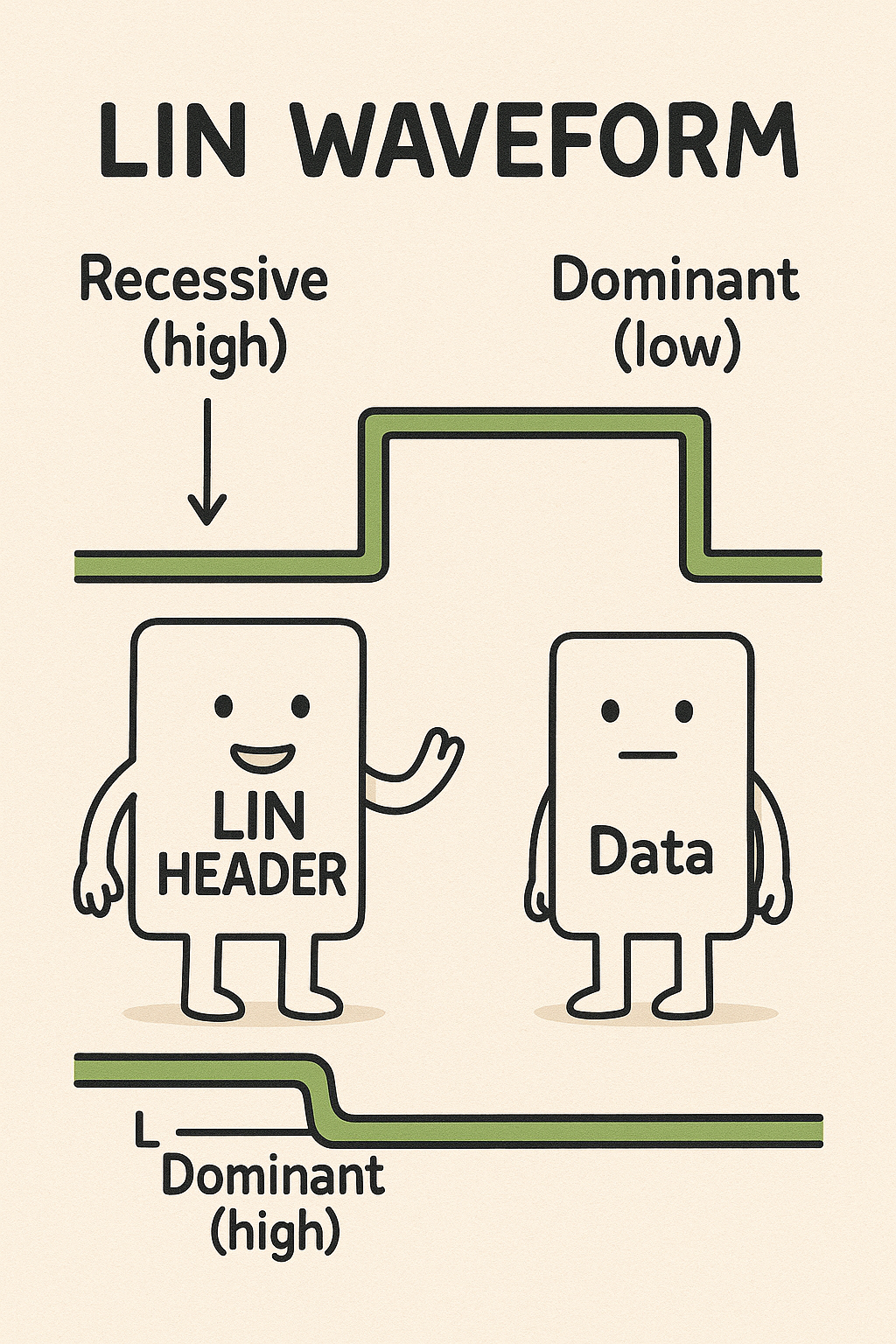
- 상단에는 "LIN WAVEFORM"이라는 제목이 있고,
- 중앙에는 초록색 파형이 그려져 있으며, 이는 전압의 변화를 시간에 따라 시각적으로 나타낸 것입니다.
- 하단에는 파형의 각 부분을 대표하는 두 캐릭터:
- 🤗 LIN HEADER (왼쪽): 손을 흔들며 친절한 인상, 시작 신호를 나타냅니다.
- 😐 Data (오른쪽): 조용한 표정, 데이터 전달을 의미합니다.
⚡ 파형 해석
- Recessive (high)
- 기본 전압 상태 (Idle 상태)
- 파형이 위쪽에 있을 때
- 데이터가 없는 상태
- Dominant (low)
- 데이터가 전송되는 상태
- 파형이 아래쪽으로 떨어졌을 때
- 주로 LIN Header나 데이터가 존재함을 나타냄
🧠 통신 흐름 설명
- 먼저 LIN Header가 dominant 신호로 내려가면서 통신 시작을 알립니다.
- 이후 Data 구간으로 이어지며 필요한 정보가 송수신됩니다.
- 모든 전송이 끝나면 다시 recessive 상태로 돌아가며 통신이 마무리됩니다.
🧰LIN 통신의 구성 요소
- Master Node: 데이터 전송을 주도하며 모든 통신 흐름 제어
- Slave Node: Master의 명령에 응답하여 데이터 송수신
- 1선 통신라인: 12V 기준 전압의 단일 와이어 사용
- 데이터 속도: 최대 20kbps
📦LIN 데이터 프레임 구조

- 🔷 LIN 프레임 구성 요소
- 역할: 프레임의 시작을 알림
- 설명: 긴 low 레벨 신호 (dominant 상태)로 slave들이 "이제 시작이구나!" 하고 인식하게 함
- 캐릭터 의미: 💡 아이디어를 떠올린 듯한 캐릭터 = 프레임의 시작을 알리는 신호
2. SYNC FIELD- 역할: 마스터와 슬레이브 간의 속도 동기화
- 설명: 0x55(Hex) = 01010101 (논리적으로 고저신호 반복)로, Slave가 마스터의 보레이트를 맞추게 함
- 캐릭터 의미: ⏰ 시계를 들고 있는 캐릭터 = 시간/속도 맞추기
3. IDENTIFIER- 역할: 어떤 Slave가 반응해야 하는지를 지시함
- 설명: 6비트 ID + 2비트 패리티로 구성됨
- 캐릭터 의미: 🔍 돋보기를 든 캐릭터 = 어떤 데이터를 보낼지 조사함
4. DATA FIELD- 역할: 실제로 전달되는 데이터
- 설명: 1~8 바이트까지 가능
- 캐릭터 의미: 💌 편지를 들고 있는 캐릭터 = 전달할 내용을 들고 있음
5. CHECKSUM- 역할: 데이터 오류 검출
- 설명: 데이터 필드의 내용을 기반으로 계산된 값, 수신 측에서 동일하게 계산해 비교
- 캐릭터 의미: 🛡️ 방패를 든 캐릭터 = 오류로부터 프레임을 보호함
💡LIN 통신의 특징

✔ 단방향 및 양방향 통신 모두 지원
✔ 통신 비용 절감 (단선 구조)
✔ 실시간성이 적은 통신에 최적화
✔ 진단 장비를 통한 고장 진단 가능
✔ 통신 비용 절감 (단선 구조)
✔ 실시간성이 적은 통신에 최적화
✔ 진단 장비를 통한 고장 진단 가능
LIN은 SCI(UART) 기반으로 작동하며, slave 장치는 크리스털 없이 셀프 동기화가 가능합니다. 이로 인해 비용을 줄이고도 일정 수준의 통신 정확성을 확보할 수 있습니다.
⚡ LIN 통신 전압 레벨
상태전압 범위 (12V 시스템 기준)의미 및 동작 역할
| Dominant | 약 0~1V | Low 상태 (논리 0), 활성 신호 |
| Recessive | 약 Battery 전압 (10~12V) | High 상태 (논리 1), 대기 상태 |
🧠 상세 설명
- Dominant (Low, 약 0~1V)
- 마스터 또는 슬레이브가 버스를 활성화시킬 때 나타나는 전압
- LIN 버스를 GND 방향으로 당김 (풀다운)
- 이 상태에서 데이터 전송이 이뤄짐
- 예: Sync Break, Start Bit, 0비트 등
- Recessive (High, 약 12V)
- 버스가 풀업 저항에 의해 휴지 상태를 유지할 때의 전압
- 아무도 버스를 드라이브하지 않을 때 기본 전압
- 대부분의 시간은 이 상태 (대기)
🔧 회로적 특징
- LIN 통신선은 풀업 저항(1kΩ)으로 12V에 연결되어 있고,
송신 장치가 트랜지스터를 통해 그라운드로 끌어내려 Dominant 상태를 만듭니다. - 다시 트랜지스터가 꺼지면 선은 풀업 저항에 의해 다시 12V로 올라갑니다 (Recessive).
🆚CAN 통신과의 비교
| 항목 | LIN | CAN |
|---|---|---|
| 통신 방식 | Single Master / Multi Slave | Multi Master |
| 통신 속도 | 최대 20kbps | 최대 1Mbps |
| 물리적 구조 | 1선 통신 | 2선 트위스트 페어 |
| 용도 | 편의 장치 (윈도우, 시트 등) | 주행 안전, 엔진 제어 등 |
| 에러 처리 | 체크섬 방식 | CRC + 에러 플래그 |
🔍LIN 통신의 진단 및 점검
진단 장비를 이용해 LIN 프레임의 헤더와 응답 데이터를 오실로스코프 등으로 확인합니다.
- 정상 파형: Header → Response 순으로 나타남
- 점검 항목: 응답 시간, 신호 간격, 전압 레벨(12V 기준)
🧾LIN 통신이 적용되는 장치 예
- 전동 시트 조절장치
- 에탁스(ETACS) 제어
- 사이드미러 조절장치
- 도어락 및 창문 제어
- 차량 실내 조명 제어
🚨LIN 통신의 한계 및 주의사항
- 고속 통신 불가 → 실시간 제어에는 부적합
- 오류 처리 방식 간단 → 복잡한 오류 진단에는 CAN보다 부족
- 1개의 노드 문제로 전체 통신 차단 가능성 존재
📚맺음말
LIN 통신은 비용 효율성과 설치 편의성에서 매우 뛰어나, 현대 자동차의 다양한 편의기능 제어에 필수적인 기술입니다. CAN 통신과의 적절한 분업을 통해 전체 차량 네트워크 구조의 효율성과 안정성을 높이는 것이 핵심입니다.
다음 시간에는 CAN 통신에 대해서 알아보자.
반응형